PhenoRobot หุ่นยนต์ตรวจวัดฟีโนไทป์พืชเพื่อการวิจัยและการผลิตพืชในระดับอุตสาหกรรม

ที่ผ่านมาการวิจัยและพัฒนากระบวนการผลิตพืช โดยเฉพาะพืชเศรษฐกิจและพืชสมุนไพรที่ให้สารสำคัญมูลค่าสูง นักวิจัยต้องวัดและจัดเก็บข้อมูลฟีโนไทป์ (phenotype) ซึ่งเป็นลักษณะปรากฏของพืช เช่น ความสูงของต้น ขนาดและสีของใบ อัตราการเจริญเติบโต ปริมาณผลผลิต และคุณสมบัติของผลผลิต ที่เป็นผลจากปัจจัยทางพันธุกรรมและสิ่งแวดล้อมเพื่อใช้เป็นข้อมูลประกอบการวิจัย ซึ่งทั่วไปกระบวนการนี้ต้องใช้ทั้งเวลาและแรงกายในการปฏิบัติงานมาก
แต่ปัจจุบันด้วยความก้าวหน้าของเทคโนโลยี ทำให้ห้องปฏิบัติการชั้นนำของหลายประเทศเริ่มนำระบบ High-Throughput Phenotyping (HTPP) หรือระบบตรวจวัดและประมวลผลข้อมูลฟีโนไทป์ของพืชแบบอัตโนมัติมาใช้งานกันมากขึ้นแล้ว เพราะนอกจากจะช่วยอำนวยความสะดวกเรื่องการเก็บข้อมูล ยังช่วยให้ผู้ปฏิบัติงานเข้าถึงข้อมูลที่สำคัญต่อการวิจัยได้รวดเร็วยิ่งขึ้น

กระทรวงการอุดมศึกษา วิทยาศาสตร์ วิจัยและนวัตกรรม (อว.) โดยศูนย์เทคโนโลยีอิเล็กทรอนิกส์และคอมพิวเตอร์แห่งชาติ (เนคเทค) ร่วมกับศูนย์พันธุวิศวกรรมและเทคโนโลยีชีวภาพแห่งชาติ (ไบโอเทค) สำนักงานพัฒนาวิทยาศาสตร์และเทคโนโลยีแห่งชาติ (สวทช.) พัฒนา PhenoRobot (ฟีโนโรบอต) หุ่นยนต์ตรวจวัดฟีโนไทป์ของพืชที่ปลูกในโรงงานผลิตพืชด้วยแสงเทียม (Plant Factory with Artificial Lighting) และระบบซอฟต์แวร์สำหรับบริหารจัดการและประมวลผลข้อมูลให้อยู่ในรูปแบบพร้อมใช้งาน ปัจจุบันอยู่ระหว่างทดสอบใช้งานจริงในพื้นที่โรงงานผลิตพืชของ สวทช.
PhenoRobot ยกหน้าที่จัดเก็บข้อมูลให้หุ่นยนต์

ดร.ธีระ ภัทราพรนันท์ นักวิจัยอาวุโสทีมวิจัยเทคโนโลยีเกษตรดิจิทัล เนคเทค สวทช. อธิบายว่า PhenoRobot เป็นหุ่นยนต์ต้นแบบสำหรับใช้จัดเก็บข้อมูลฟีโนไทป์ของพืชในโรงงานผลิตพืชที่มีการจัดวางพื้นที่เพาะปลูกเป็นแบบ 4 ชั้น โดย PhenoRobot มีรูปทรงกะทัดรัด สูง 2.4 เมตร น้ำหนัก 60 กิโลกรัม ลำตัวมีกล้องถ่ายภาพสองมิติและสามมิติ ติดตั้งตามแนวดิ่งจำนวน 4 ชุด แต่ละชุดห่างกันประมาณ 45 เซนติเมตร เพื่อเก็บข้อมูลแต่ละชั้นปลูก
“PhenoRobot ผ่านการออกแบบให้เคลื่อนไหวได้คล่องตัวในพื้นที่จำกัด เคลื่อนที่ไปปฏิบัติงานตามจุดต่าง ๆ ได้ด้วยตัวเองตามเส้นทางและแผนที่ที่กำหนด โดยไม่จำเป็นต้องมีเจ้าหน้าที่ควบคุมตลอดการทำงาน สามารถเดินถ่ายภาพภายในโรงงานขนาดประมาณ 480 ตารางเมตร พื้นที่เพาะปลูกรวมประมาณ 690 ตารางเมตร ได้เสร็จภายในระยะเวลาเพียง 2 ชั่วโมง นอกจากนี้ยังผ่านการออกแบบเรื่องระบบจัดการพลังงานมาเป็นอย่างดี ทำให้การชาร์จหนึ่งครั้งปฏิบัติงานต่อเนื่องได้หลายวัน”

หน้าที่หลักของ PhenoRobot คือ การถ่ายภาพพืชทั้งแบบสองมิติและสามมิติเพื่อติดตามการเจริญเติบโตของพืชภายในโรงงาน
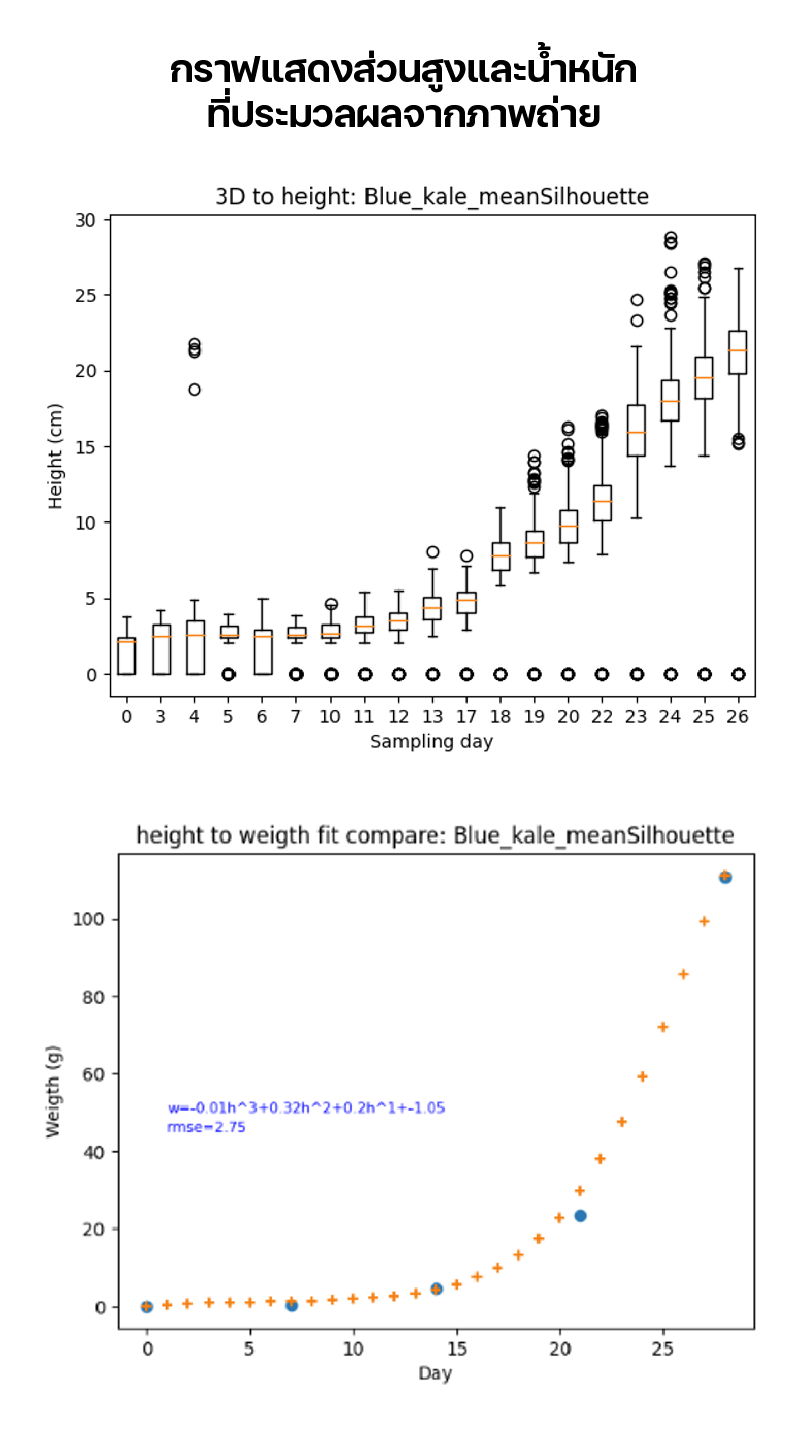
ดร.ธีระ อธิบายว่า PhenoRobot จะบันทึกภาพถ่ายและส่งไฟล์ไปจัดเก็บลงฐานข้อมูลในเซิร์ฟเวอร์แบบอัตโนมัติ จากนั้นซอฟต์แวร์จะวิเคราะห์ภาพ เช่น ความสูง พื้นที่ใบ เพื่อใช้ประเมินการเจริญเติบโต ทำนายน้ำหนักของผลผลิต หรือปัจจัยอื่น ๆ ตามโจทย์วิจัยที่กำหนด หลังจากนั้นจึงจัดเก็บผลการวิเคราะห์ที่อยู่ในรูปแบบพร้อมใช้งานเข้าสู่ระบบ เพื่อให้นักวิจัยหรือผู้ควบคุมการผลิตติดตามข้อมูลได้สะดวกและรวดเร็วแบบวันต่อวัน
การเก็บข้อมูลด้วย PhenoRobot จะเน้นไปที่การตรวจวัดลักษณะทางสัณฐานวิทยา (morphology) เป็นหลัก เช่น ความสูงของต้น พื้นที่ใบ ความหนาแน่นของพุ่ม รวมถึงสีของใบและลำต้น ซึ่งเป็นข้อมูลที่ประมวลผลได้จากภาพถ่าย 2 มิติและ 3 มิติ เหมาะแก่การใช้ติดตามการเจริญเติบโตและวิเคราะห์สุขภาพของพืช โดยทั้งหมดนี้เป็นข้อมูลพื้นฐานที่ใช้ศึกษาการตอบสนองของพืชต่อสภาพแวดล้อมหรือรูปแบบการเพาะปลูก
เพิ่มฟังก์ชัน เพิ่มความสามารถในการประมวลผล
ดร.ธีระ เล่าว่า นอกจากอุปกรณ์ถ่ายภาพ 2 มิติ และ 3 มิติ ซึ่งเป็นอุปกรณ์พื้นฐานแล้ว PhenoRobot ยังติดตั้งเซนเซอร์สำหรับตรวจวัดเพิ่มเติมได้อีกตามวัตถุประสงค์ของการวิจัย หรือการควบคุมกระบวนการผลิต เช่น การติดตั้งกล้องถ่ายภาพความร้อน (thermal camera) เพื่อดูอุณหภูมิและตรวจจับความเครียดของพืชที่เกิดจากการขาดน้ำหรือความผิดปกติอื่น ๆ การติดตั้งกล้องมัลติสเปกตรัม (multi-spectral camera) เพื่อถ่ายช่วงคลื่นที่ตามองไม่เห็น เหมาะสำหรับใช้ตรวจสุขภาพพืชผ่านการวัดค่าดัชนีต่าง ๆ เช่น NDVI (Normalized Difference Vegetation Index) เพื่อประเมินประสิทธิภาพสังเคราะห์แสง
“อย่างไรก็ตามการเลือกใช้อุปกรณ์หรือซอฟต์แวร์ชนิดใดและรูปแบบไหนบ้างขึ้นอยู่กับโจทย์การใช้งาน โดยทีมวิจัยทั้ง 3 ทีมหลักที่ร่วมกันพัฒนา PhenoRobot และซอฟต์แวร์เพื่อการประมวลผลประกอบด้วยทีมวิจัยเทคโนโลยีเกษตรดิจิทัลและทีมวิจัยสมองกลอัจฉริยะและความจริงเสมือน จากเนคเทค และกลุ่มวิจัยเทคโนโลยีชีวภาพพืชและการจัดการแบบบูรณาการ จากไบโอเทค พร้อมให้บริการด้านการวิจัยและพัฒนาทั้งฮาร์ดแวร์ ซอฟต์แวร์ และกระบวนการผลิตพืช เพื่อให้ได้เทคโนโลยีที่เหมาะสมกับความต้องการใช้งานมากที่สุด”
การพัฒนา PhenoRobot เป็นส่วนหนึ่งของการวิจัยเพื่อขับเคลื่อนเทคโนโลยี HTPP ในประเทศไทย นอกจากสนับสนุนการวิจัยและพัฒนากระบวนการผลิตพืชและการยกระดับอุตสาหกรรมเกษตรแล้ว ยังนำไปสู่การเพิ่มขีดความสามารถทางการแข่งขันของพืชเศรษฐกิจและสมุนไพรไทยในตลาดโลก
ผู้ที่สนใจเทคโนโลยีทั้งด้านฮาร์ดแวร์ ซอฟต์แวร์ และกระบวนการผลิตพืช ติดต่อสอบถามรายละเอียดเพิ่มเติมได้ที่ ทีมวิจัยเทคโนโลยีเกษตรดิจิทัล เนคเทค สวทช. อีเมล teera.phatrapornnant@nectec.or.th หรือเบอร์โทรศัพท์ 0 2564 6900 ต่อ 2816
เรียบเรียงโดย ภัทรา สัปปินันทน์ ฝ่ายสร้างสรรค์สื่อและผลิตภัณฑ์ สวทช.
อาร์ตเวิร์กโดย ภัทรา สัปปินันทน์
คลิปสั้นโดย ภัทรา สัปปินันทน์ และกุลพงษ์ อ้นมณี ฝ่ายสร้างสรรค์สื่อและผลิตภัณฑ์ สวทช., อัครวุฒิ ตู้วชิรกุล ฝ่ายประชาสัมพันธ์ สวทช. และปฏิวัติ อ่อนพุทธา ฝ่ายจัดการความรู้และสร้างความตระหนัก สวทช.
ภาพประกอบโดย ชัชวาลย์ โบสุวรรณ ฝ่ายประชาสัมพันธ์ สวทช. และเนคเทค สวทช.