การแพร่ระบาดของโรค COVID-19 ทำให้เกิดความเสี่ยงต่อการฟุ้งกระจายของเชื้อไวรัสสู่พื้นผิวต่างๆ ได้ตลอดเวลา โดยเฉพาะสถานที่ที่มีพื้นที่ขนาดใหญ่
อาทิ โรงพยาบาล ห้างสรรพสินค้า ซุปเปอร์มาร์เก็ต โรงภาพยนตร์ เป็นต้น
อาทิ โรงพยาบาล ห้างสรรพสินค้า ซุปเปอร์มาร์เก็ต โรงภาพยนตร์ เป็นต้น
การฆ่าเชื้อด้วยรังสียูวีซี (UVC) นอกจากจะสามารถทำลายเชื้อไวรัสแล้ว ยังสามารถฆ่าเชื้อได้ทั้งในกลุ่มของ แบคทีเรีย (Bacteria) เชื้อรา (Molds)
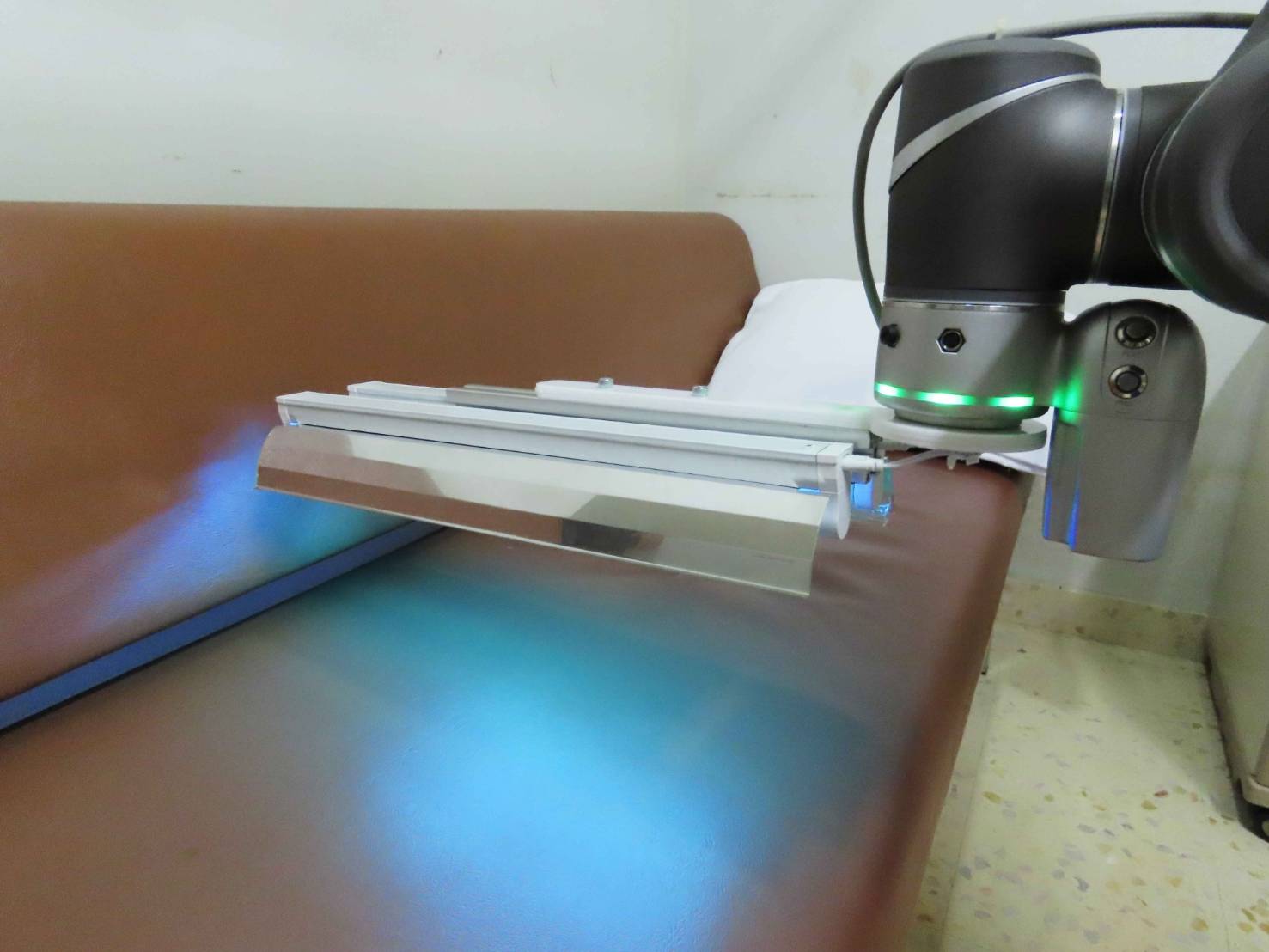
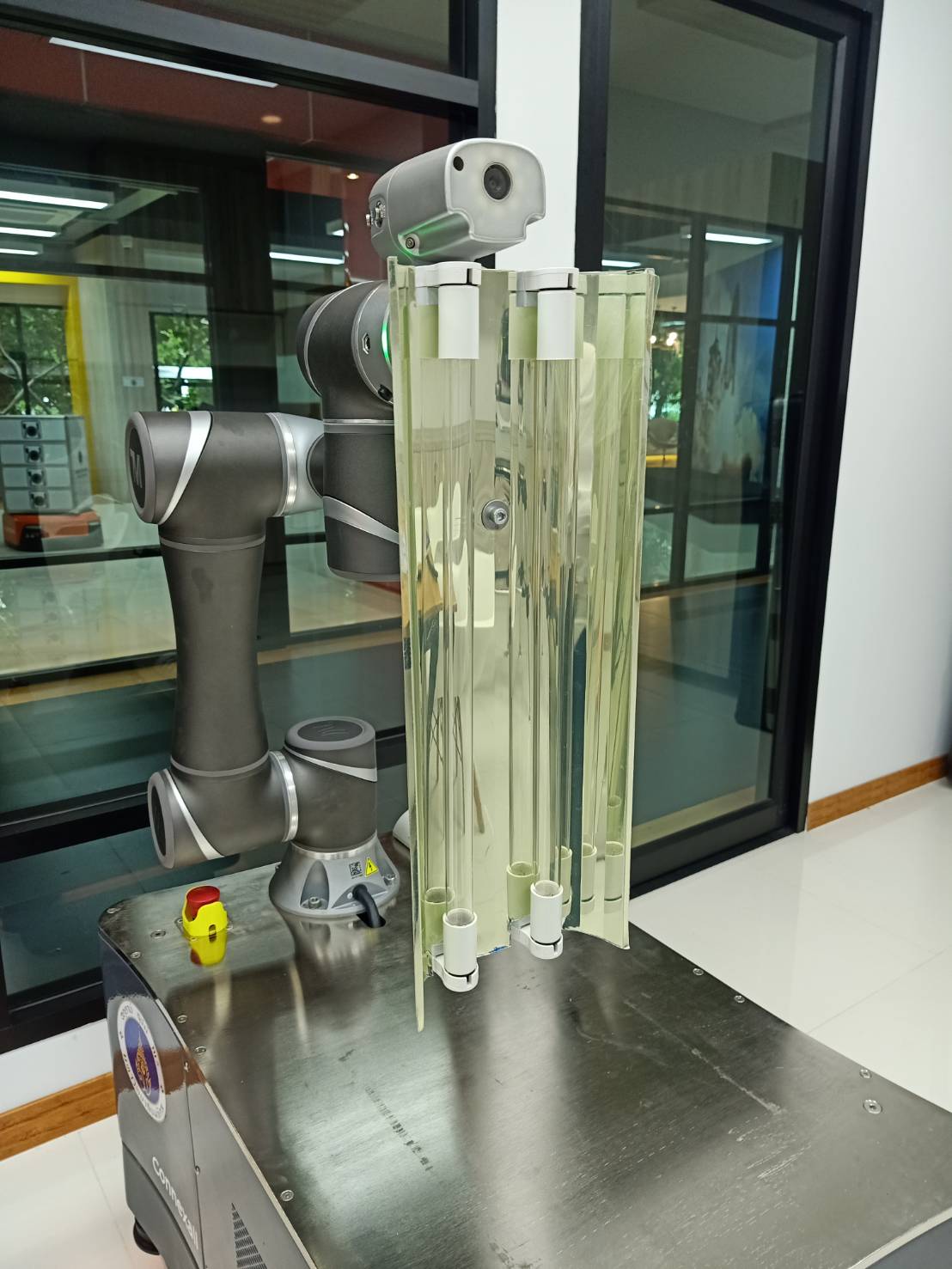
โปรโตซัว (Protozoa) และยีสต์ (Yeast) ซึ่งประสิทธิภาพในการฆ่าเชื้อขึ้นอยู่กับปัจจัยของค่าความเข้ม (Power Density) ของรังสีที่กระทบวัตถุ และเวลา (Time) ของการฉายรังสีต่อการกำเนิดพลังงาน (Energy) ที่เพียงพอในการฆ่าเชื้อแต่ละชนิด ปัจจุบันมีตู้อบยูวีซีเพื่อใช้ในการฆ่าเชื้อจำนวนมาก ส่วนใหญ่มีลักษณะ
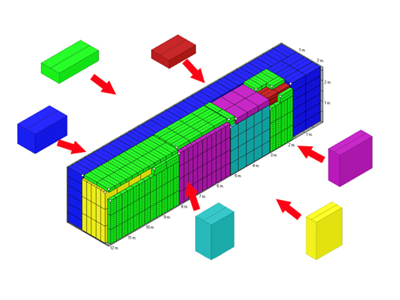
เป็นการรับรังสีจากแหล่งกำเนิดติดตรึง (Stationary Radiation Source) โดยที่ระยะห่างของพื้นผิวหน้าวัตถุจะมีผลของการรับความเข้มของรังสีที่แตกต่างกัน ดังนั้น ประสิทธิภาพของการฆ่าเชื้อจะได้ผลไม่เท่ากันในแต่ละพื้นที่ ยิ่งวัตถุอยู่ห่างจากแหล่งกำเนิดรังสียูวีซีมากขึ้น ประสิทธิภาพในการฆ่าเชื้อจะลดลง
ส่งผลให้เชื้อโรคบนวัตถุที่อยู่ไกลแหล่งกำเนิดยูวีซีอาจไม่ถูกกำจัดจนหมดสิ้น
โปรโตซัว (Protozoa) และยีสต์ (Yeast) ซึ่งประสิทธิภาพในการฆ่าเชื้อขึ้นอยู่กับปัจจัยของค่าความเข้ม (Power Density) ของรังสีที่กระทบวัตถุ และเวลา (Time) ของการฉายรังสีต่อการกำเนิดพลังงาน (Energy) ที่เพียงพอในการฆ่าเชื้อแต่ละชนิด ปัจจุบันมีตู้อบยูวีซีเพื่อใช้ในการฆ่าเชื้อจำนวนมาก ส่วนใหญ่มีลักษณะ
เป็นการรับรังสีจากแหล่งกำเนิดติดตรึง (Stationary Radiation Source) โดยที่ระยะห่างของพื้นผิวหน้าวัตถุจะมีผลของการรับความเข้มของรังสีที่แตกต่างกัน ดังนั้น ประสิทธิภาพของการฆ่าเชื้อจะได้ผลไม่เท่ากันในแต่ละพื้นที่ ยิ่งวัตถุอยู่ห่างจากแหล่งกำเนิดรังสียูวีซีมากขึ้น ประสิทธิภาพในการฆ่าเชื้อจะลดลง
ส่งผลให้เชื้อโรคบนวัตถุที่อยู่ไกลแหล่งกำเนิดยูวีซีอาจไม่ถูกกำจัดจนหมดสิ้น