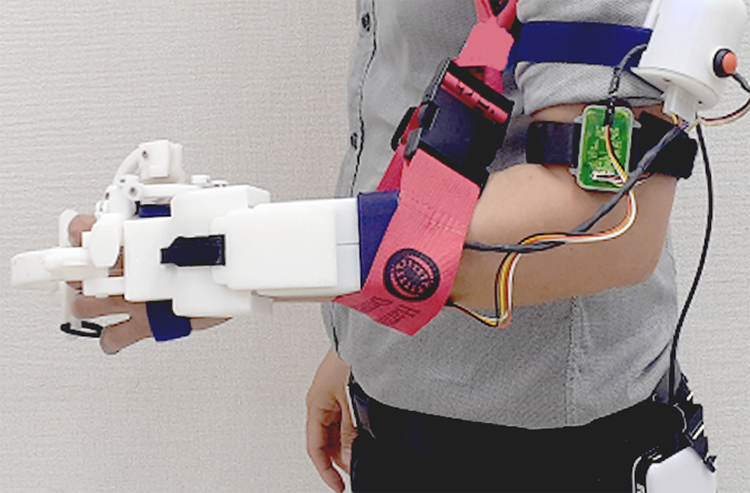
ระบบหุ่นยนต์แบบมีสัญญาณชีวภาพสำหรับฝึกการเคลื่อนไหวของมือพร้อมระบบบริการแบบทางไกล Biofeedback rObot for haNd exercise with Tele-supervision system (BONT)
สำหรับระบบหุ่นยนต์ BONT คือระบบหุ่นยนต์สำหรับฝึกการเคลื่อนไหวของมือที่มีสัญญาณชีวภาพเพื่อตรวจจับสภาวะทางกายของผู้ใช้ และมีระบบบริการแบบทางไกล เพื่อให้ผู้ใช้สามารถติดต่อสื่อสารกับหน่วยงานที่ดูแลสุขภาพของผู้ใช้ได้ โดยระบบหุ่นยนต์ติดต่อสื่อสารกับระบบควบคุมแบบไร้ส้าย ทำให้การใช้งานระบบหุ่นยนต์มีความคล่องตัวมากขึ้น ไม่มีสายเชื่อมต่อให้ยุ่งยาก และโครงสร้างทางกลของระบบหุ่นยนต์เป็นแบบ Exoskeleton ที่สามารถสวมใส่มือได้โดยตรง โดยยึดหลักการ Modular Design ที่ส่วนสวมมือ แยกออกจากส่วนขับเคลื่อนหลัก ทำให้ระบบหนึ่งระบบใช้ส่วนขับเคลื่อนหลักร่วมกันได้ เน้นให้ระบบหุ่นยนต์ดูแล้วเข้าใจได้โดยง่ายว่าต้องติดตั้งเข้ากับมือของผู้ใช้ได้อย่างไร สวมใส่ได้กับมือที่มีหลากหลายขนาด กับส่วนสวมมือซ้ายและส่วนสวมมือขวาได้ให้สอดคล้องกับการใช้งานในของผู้ใช้
คุณลักษณะ
จุดเด่น/ประโยชน์ของเทคโนโลยี
ขอบเขต/ข้อจำกัดการใช้งาน
กลุ่มลูกค้า/ผู้ใช้งานเทคโนโลยีเป้าหมาย
สถานภาพการพัฒนา
หน่วยงานพันธมิตร
ภาควิชาเวชศาสตร์ฟื้นฟู คณะแพทยศาสตร์ จุฬาลงกรณ์มหาวิทยาลัย
วิจัยพัฒนาโดย
ทีมวิจัยการประมวลสัญญาณประสาท (NSP)
กลุ่มวิจัยปัญญาประดิษฐ์ (AINRG)
ศูนย์เทคโนโลยีอิเล็กทรอนิกส์และคอมพิวเตอร์แห่งชาติ