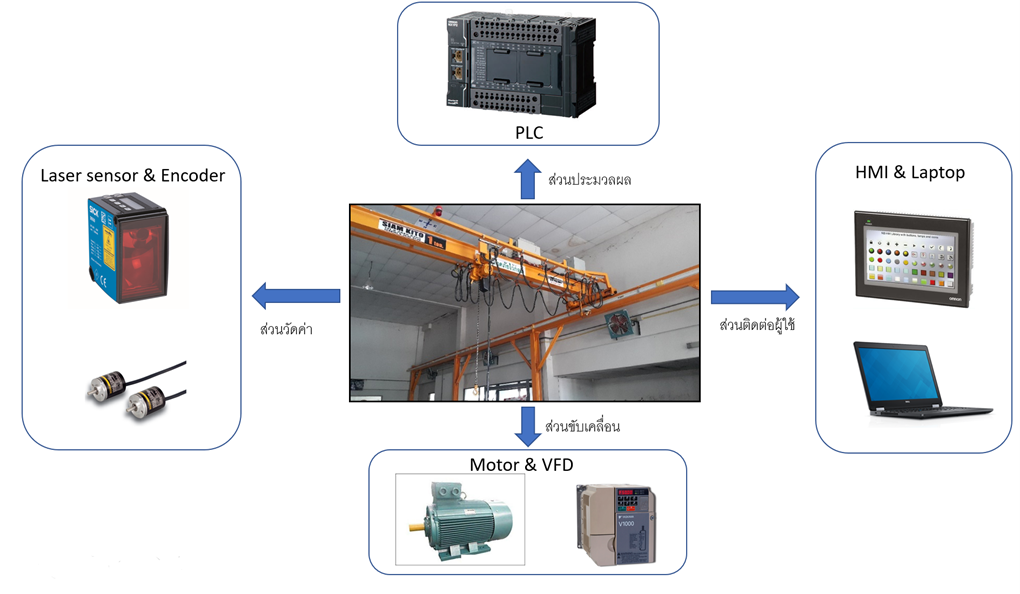
งานวิจัยนี้มีเป้าหมายเพื่อการพัฒนาต้นแบบเครนเหนือศีรษะอัตโนมัติ ที่แก้ปัญหาการใช้งานในเครนทั่วไป และรองรับการพัฒนาเพิ่มเติมในอนาคต ระบบเครนที่พัฒนาจะสามารถเคลื่อนที่ได้อย่างแม่นยำ ไปตามตำแหน่งที่ผู้ใช้ต้องการได้โดยอัตโนมัติ และกำจัดการแกว่งของเครนซึ่งเป็นปัญหาโดยธรรมชาติของเครนประเภทนี้ ตลอดจนการบันทึกข้อมูลการใช้งานเพื่อประโยชน์ในการให้บริการซ่อมบำรุง