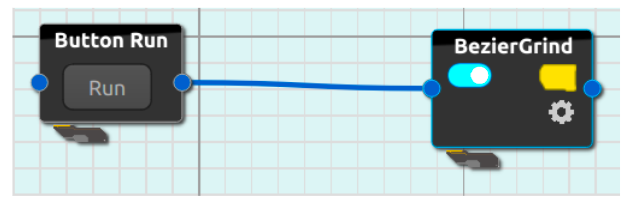
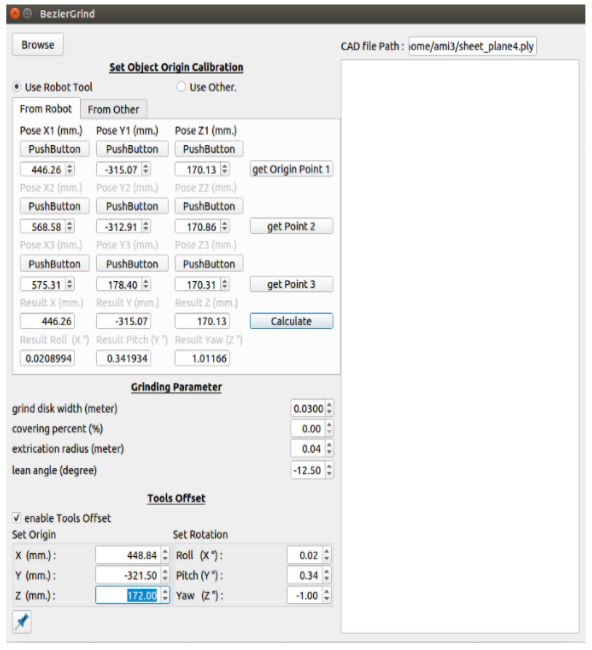
ในส่วนการใช้งานแพลตฟอร์ม CiRACORE เพื่อขัดพื้นผิวชิ้นงาน นั้นเป็นแบบ Node flow programming ซึ่งอยู่บนพื้นฐานของระบบปฏิบัติการหุ่นยนต์ (Robot Operating System : ROS) หลักการของ Node flow programming คือแต่ละโหนด (Node) หรือกล่องคำสั่งจะเป็นส่วนที่ทำการสร้างการเปลี่ยนแปลงให้กับข้อมูลที่ส่งเข้ามา ซึ่งในที่นี้เราเรียกว่าการไหลของข้อมูล (Data flow) ซึ่งอยู่ในรูปแบบของ JSON format ในแต่ละกล่องคำสั่ง หรือ Node จะเป็น C++ object ที่จะจัดการกับการไหลของข้อมูล และส่งออกไปเป็นเอาท์พุทต่อๆไป CiRACORE จะมี Nodes ที่จัดเป็นหมวดหมู่สำหรับงานต่างๆ โดยเริ่มจาก flow control and manipulation, CiRA AI และ I/O & communication ในกระบวนการขัดนั้น ใช้กล่องคำสั่ง Button Run เพื่อเริ่มการทำงาน และกระบวนการขัดจะใช้อีกกล่องคำสั่ง BezierGrind เพื่อสั่งงานและปรับค่าพารามิเตอร์ต่างๆสำหรับงานขัด ดังแสดงในรูปที่ 2